PX4 1.14.3 物流无人机开发 | 模块概述与分析
课程介绍
随着无人机技术的快速发展及其在各个行业中的广泛应用,低空经济 (Low Altitude Economy) 成为了一个炙手可热的领域。低空经济主要指在低空飞行范围内,利用无人机、飞艇等航空器进行的商业活动。无人机快递服务作为低空经济的重要组成部分,正在不断改变传统物流行业的运作模式,尤其是在提升运输效率、降低成本和增加服务灵活性方面表现突出。

应用领域
- 城市物流:在城市快递领域,无人机可以减少交通拥堵,缩短配送时间。通过精准的抛投系统,无人机能够在指定地点进行物品投放,例如高楼大厦的阳台或指定的收货点。这种方式特别适用于高密度的城市环境和对时间要求高的服务场景。

- 医疗急救:在医疗急救领域,无人机快递抛投系统可以用于快速运送紧急药品、急救设备或样本。特别是在偏远地区或交通不便的地区,无人机可以大大提高急救物资的配送速度,挽救生命。
- 农田管理:在农业领域,无人机可以用来投放种子、肥料或农药,提高农业生产效率。通过精准的抛投功能,无人机能够均匀分布物资,从而优化农业资源的使用。

技术挑战
- 精准投放:快递抛投系统的核心技术之一是确保物品在空中准确投放。PX4 飞控系统支持多种传感器和定位系统,如:GPS、视觉传感器和激光雷达,这些可以用于提高投放的准确性。同时,通过对飞行轨迹的精确控制,可以确保物品落点的稳定性。
- 环境适应性:无人机在不同天气条件下的稳定性是另一个挑战。为提高系统的适应性,需要在 PX4 飞控系统中集成高性能的气象监测模块和自适应控制算法,以应对风速变化、气温波动等环境因素。
- 安全性与合规性:在低空经济中,无人机的安全性和合规性至关重要。课程将探讨如何在 PX4 系统中实现避障功能、实现地理围栏限制,并遵守相关航空法规,以确保无人机操作的安全性和合法性。
拓展方向
- 智能算法与大数据:未来的发展方向包括结合人工智能和大数据技术,以优化快递抛投的路径规划和任务调度。通过对大量飞行数据的分析,可以进一步提高系统的效率和可靠性。
- 无人机集群协作:无人机集群技术可以使多个无人机协同工作,提高投放效率和服务覆盖范围。PX4 系统的模块化设计支持集群控制和协调,为这一领域的创新提供了基础。
- 商业模式创新:随着技术的成熟,新的商业模式将不断涌现,例如:无人机订阅服务、按需快递等。这些新模式将推动低空经济的进一步发展和扩展。
基于 PX4 飞控系统的快递抛投功能开发不仅具备技术挑战,也有广阔的应用前景。通过深入学习和实践,我们可以充分利用 PX4 系统的优势,推动无人机在低空经济中的应用,并探索新的商业机会。
代码梳理
首先,在 PX4 的源码文件夹中找到以下内容:

通过工作队列的方式将快递快递投放功能封装成一个模块。
下面将调用快递投放模块的初始化函数:
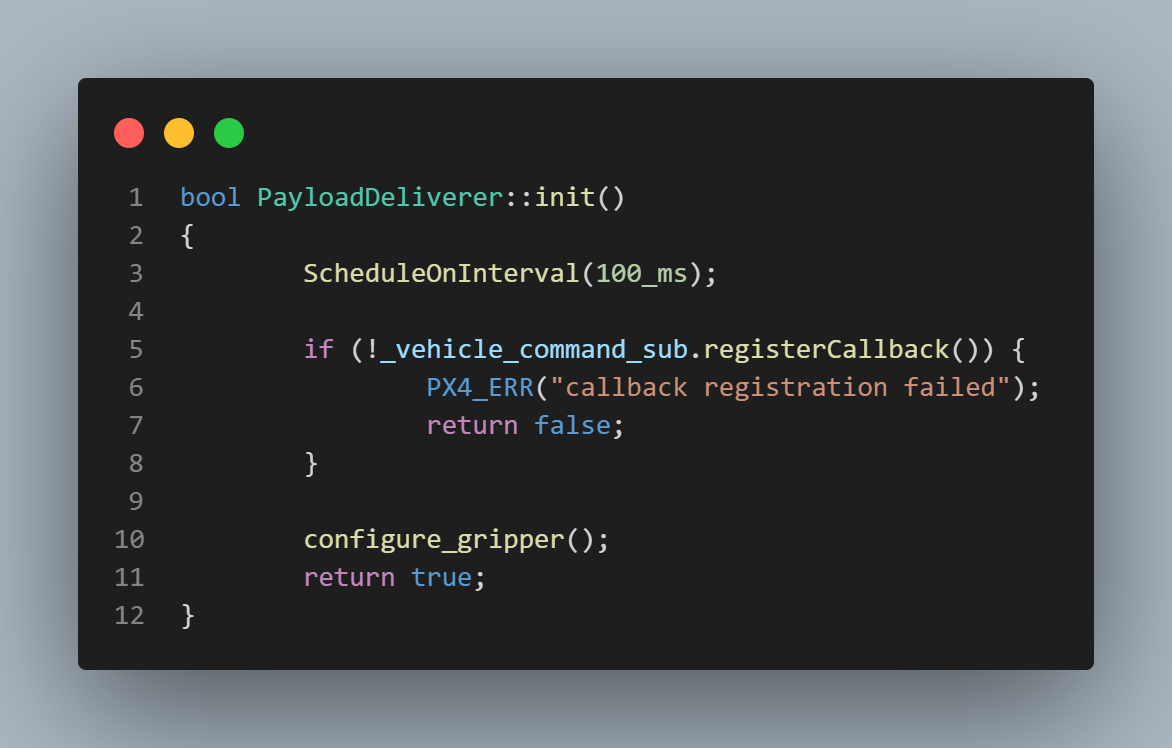
该函数的主要功能如下:
- 设置任务调度:
- 调用
ScheduleOnInterval(100_ms),使该任务或方法每隔 100 毫秒执行一次。
- 注册回调函数:
- 尝试通过
_vehicle_command_sub.registerCallback()注册一个与无人机指令相关的回调函数。 如果注册失败,将输出错误信息callback registration failed并返回false。
- 配置抓取器:
- 调用
configure_gripper()方法来配置抓取器,确保其处于正确的工作状态。
若上述步骤均成功,则返回 true 表示初始化成功;否则返回 false。
接下来,就是该模块的 run() 函数部分,也就是飞控运行时,会一直调用的部分:
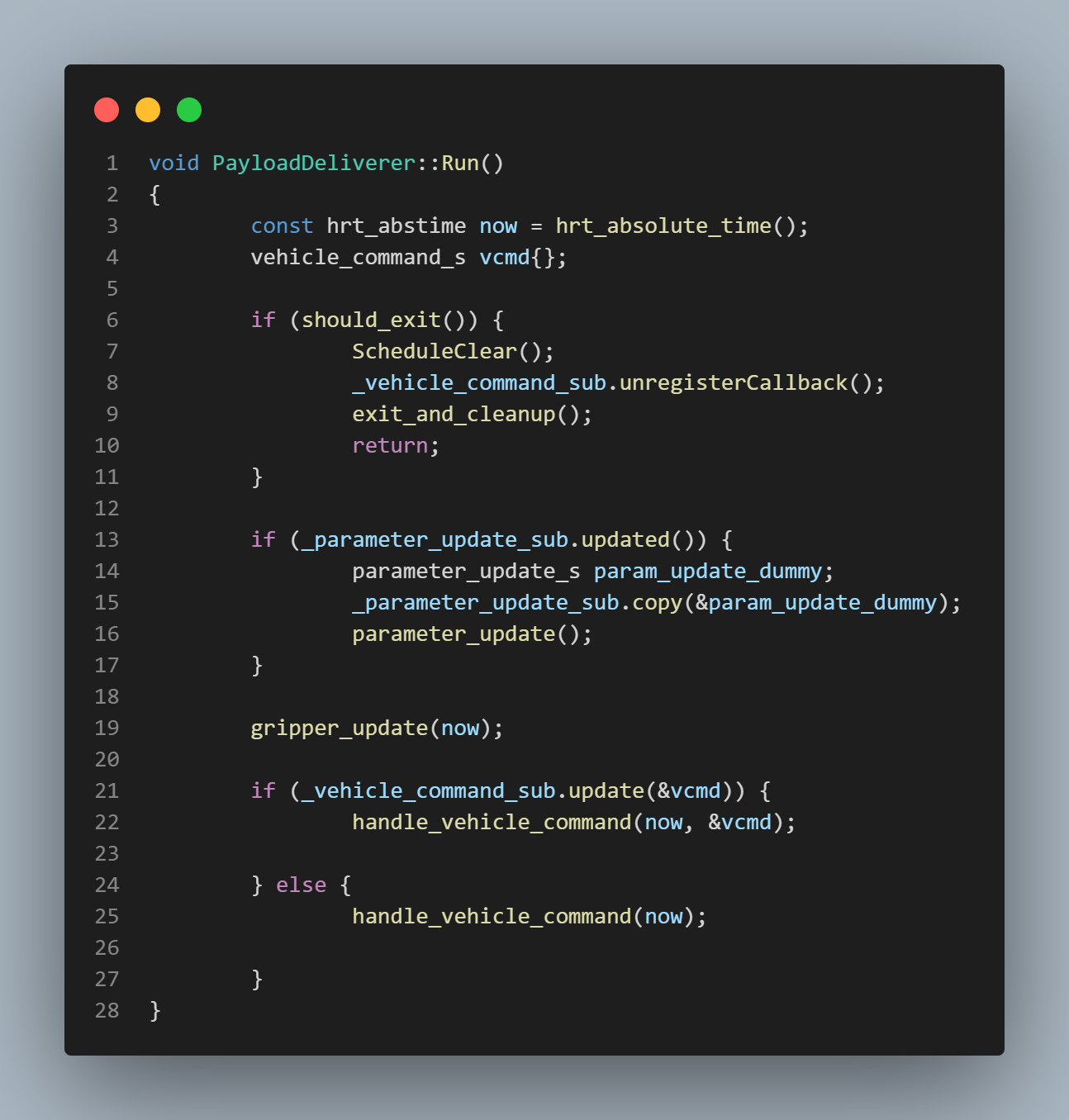
该函数主要内容如下:
- 根据
should_exit()判断该次是否需要运行以下内容,该部分调度的讲解将放在第六课程详细说明。 - 通过
_parameter_update_sub.updated()判断是否有新的参数更新消息,如果有参数更新,那么将更新这些参数。该模块中主要参数如下:
PD_GRIPPER_EN (bool):是否在该模块中使能抓取结构,1 表示使能,0 表示不使能。PD_GRIPPER_TO (float):抓取动作确认成功的超时时间,当抓取动作未被识别时,抓取将等待的最大时间。如果执行器没有反馈传感器,它将简单地等待这个时间发布一个VehicleCommandAck信号,表示抓取动作成功。PD_GRIPPER_TYPE (enum):抓取器的类型,-1 表示未定义,0 表示伺服机构。
- 在
gripper_update(now);函数中,主要更新抓取器件的状态是否达到期望的状态,并将结果通过vehicle_command主题反馈到Navigator模块中;当然如果抓取器没有初始化的话,该函数就什么事都不用做了。 - 其实第 4 步才是该模块中最核心的部分,该模块通过
vehicle_command接收来自地面站或者飞控其他模块的指令,主要是接收到了指令才会执行,没接受到就啥事也不干。
讲到这里,就需要提下 MAVLink 里面的抓取的指令,在 MAVLink 中定义如下:
MAV_CMD_DO_GRIPPER(211)
| Param (Label) | Describe | Value |
|---|---|---|
| 1(实例化个数) | 抓取器实例化序号 | 最小为1 |
| 2 | 动作 | GRIPPER_ACTION |
| 3 | Empty | |
| 4 | Empty | |
| 5 | Empty | |
| 6 | Empty | |
| 7 | Empty |
其中:GRIPPER_ACTION 数据为 0 时,表示释放动作;数据为 1 时,表示抓取动作。
应用实操
货运投送任务需要一些配置,必须先完成这些配置,才能执行任务。
货运投送任务的规划与航点任务大致相同,包括任务开始、起飞航点、各种路径航点,可能还有一个返航点。唯一的区别是包裹递送任务必须包括一个任务项,指示包裹应该在地面 (Land) 还是空中 (Waypoint) 释放,然后还有就是部署包裹的任务项 (Gripper Mechanism)。
是否着陆取决于飞行时包裹是否可以安全展开,以及飞行器是否能够在目标位置降落。因此,在使用夹取器时,多旋翼和 VTOL 飞行器通常会着陆以再释放包裹。释放包裹完成后,无人机将前往下一个航点。值得注意的是,如果着陆后释放包裹,那么下一个航点应该是另一个 Waypoint 或 Takeoff 任务项目(不能是 RETURN)。
创建货运投送任务
在创建货运投送任务之前,首先需要正确配置好抓取器,然后执行以下步骤:
- 开始创建飞行任务,设置普通的 Takeoff 点,然后为所需的飞行路径创建其他的航点。
- 如果需要无人机在目标点将落后释放包裹,那么我们需要将 Waypoint 更改为 Land 点。通过选择任务项,然后在弹出对话框中选择 Land 来执行此操作。
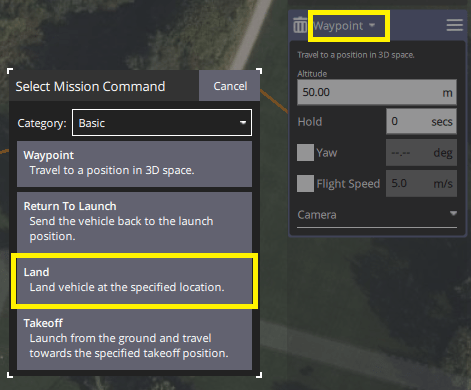
- 选择
Waypoint标题,然后在弹出窗口中将组更改为Advanced,然后选择Gripper Mechanism。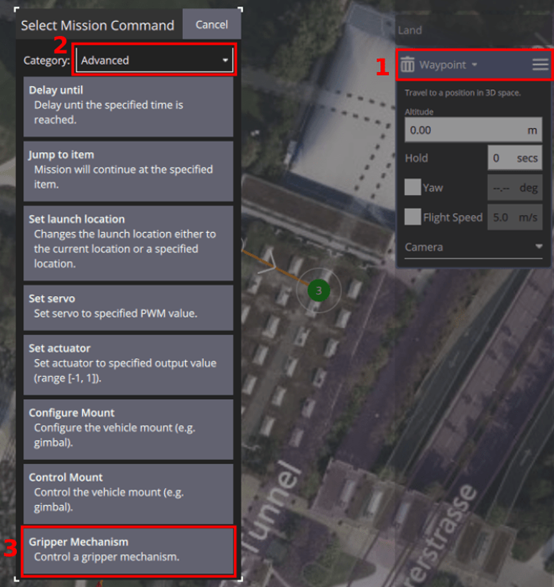
- 在编辑器中配置夹持器的操作。将其设置为
Release以释放包。当前不需要设置夹取器的设备ID。 - 为路径的其余部分添加其他路径点。如果飞机着陆了,请记住,在添加
Return航点之前,必须在Gripper Mechanism之后包含一个航点。
课程总结
本课程深入探讨了基于 PX4 飞控系统开发无人机快递抛投功能的全过程。随着无人机技术的迅猛发展,低空经济尤其是无人机快递服务已经在各行业中展现出巨大的潜力。本课程主要围绕以下几个核心内容展开:
- 低空经济与应用领域 我们首先介绍了低空经济的背景及其主要应用领域,包括城市物流、医疗急救和农田管理。在城市物流方面,无人机可以有效缓解交通拥堵,提高配送效率;在医疗急救领域,无人机能够快速运送紧急物资;在农业领域,无人机的精准抛投功能能够优化资源的使用。
- 技术挑战 课程详细讲解了 PX4 飞控系统在快递抛投中的核心技术挑战。包括确保物品精准投放的技术要求,环境适应性以及如何实现系统的安全性和合规性。通过高性能传感器和自适应控制算法,我们可以有效应对这些挑战,提升无人机在复杂环境下的作业能力。
- 代码实现与模块配置
我们深入分析了 PX4 系统中快递抛投功能的代码实现。讲解了如何通过工作队列将快递投放功能封装成一个模块,并逐步实现初始化函数和运行时函数。特别强调了模块的关键部分——通过
vehicle_command接收和处理地面站或飞控其他模块的指令,执行抓取和释放动作。 - 实操应用 在实操部分,我们介绍了如何创建和配置货运投送任务。包括:设置飞行任务、定义航点、配置抓取器以及设置包裹释放方式。特别指出了在任务规划中需注意的事项,如任务的起飞、飞行路径、包裹释放位置以及返航点的设置。
- 拓展方向 课程还探讨了未来的发展方向,包括智能算法与大数据的应用、无人机集群协作的潜力以及商业模式的创新。这些方向有望进一步推动无人机在低空经济中的应用,并开辟新的商业机会。
通过本课程的学习,我们不仅掌握了如何基于 PX4 飞控系统设计高效的快递抛投功能,还理解了无人机在低空经济中应用的广泛前景和技术挑战。随着技术的不断进步和应用场景的扩展,未来无人机快递服务将变得更加高效、智能和多样化;希望大家能将所学知识应用于实际项目中,推动无人机技术在各个领域的创新和发展。