Hello Sky你的第一个PX4应用程序
课程介绍
本节课主要在 PX4 的框架下学习以下内容:
- 如何快速开发一个简单的 PX4 模块。
- 如何编写一个模块查询 IMU 数据。
- uORB 订阅发布机制的简单使用。
课程准备
在这堂课之前,我们需要准备以下内容:
- PX4 模拟器环境或兼容 PX4 的飞行控制器硬件一套。
- 基于 WSL2 -Ubuntu 环境下的一套完整的 PX4 开发工具链。
- 完整的 PX4 V1.14.3 版本的源码,包含相应的子模块。
- 删除 PX4_AUTOPILOT/src/examples/px4_simple_app 文件夹。
Hello World
在我们学习任何一门开发语言初期,通常是从输出一句 Hello World! 开始的。在这节课程中,我们也将会创建一个最简单的飞控应用,通过飞控输出字符串 Hello World! 到地面站终端;正所谓万丈高楼平地起,那么下面将开启我们飞控的第一行代码,这其中包括一个 c 文件和 cmake 的一些定义(其中:cmake 的作用是告知主控芯片如何构建程序,我们可以先不用关心 cmake 的其他特性,先就按照课程一步一步做下去,后续有兴趣的同学可以自行拓展学习)。
添加代码
-
创建应用程序的文件夹:PX4-Autopilot/src/examples/px4_simple_app
-
在文件夹下创建 c 文件,并命名为 px4_simple_app.c
-
拷贝如下的默认版权信息,放在上述文件代码的最前处,这里大概包含了以下内容:
a. 版权声明:PX4 源码通常在文件开头包含版权声明,表明该软件的版权归属于 PX4 开发团队。
b. 许可证:PX4 主要采用 BSD 3-clause 许可证。这是一种宽松的开源许可证,允许用户自由使用、修改和分发代码,只要保留原始版权声明。
c. 免责声明:声明中通常包含免责条款,表明软件按”原样”提供,不提供任何明示或暗示的保证。
d. 贡献者协议:可能会提到贡献者协议,说明向 PX4 项目提交代码的开发者需要同意的条款。
e. 其他信息:有时还会包含项目网站链接、主要维护者信息等。
/****************************************************************************
*
* Copyright (c) 2012-2019 PX4 Development Team. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in
* the documentation and/or other materials provided with the
* distribution.
* 3. Neither the name PX4 nor the names of its contributors may be
* used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
****************************************************************************/- 然后,标注好开发者信息,也就是你的名字和邮箱,这方便后续开发者遇到问题,方便询问等。
/**
* @file px4_simple_app.c
* Minimal application example for PX4 autopilot
*
* @author Example User <mail@example.com>
*/
#include <px4_platform_common/log.h>
__EXPORT int px4_simple_app_main(int argc, char *argv[]);
int px4_simple_app_main(int argc, char *argv[])
{
PX4_INFO("Hello World!");
return OK;
}其中:__EXPORT int px4_simple_app_main(int argc, char *argv[]) 函数的具体功能如下:
- 程序入口:作为 PX4 飞行控制软件中的一个应用程序的主入口点。
- 参数接收:int argc: 表示命令行参数的数量,包括程序名称在内的参数总数。char *argv[]: 是一个字符指针数组,存储了所有命令行参数的具体值,其中argv[0]通常为程序名称。
- 执行流程:在函数内部,可能进行以下操作: a. 初始化应用程序所需的资源或模块。 b. 解析传入的命令行参数,根据不同的参数执行相应的功能或配置。 c. 启动应用程序的主要功能,如数据采集、传感器读取、控制逻辑执行等。
- 返回值:函数返回一个 int 类型的值,通常用于指示程序执行的状态或结果,例如:0 表示成功,非 0 值表示错误代码。
- 主函数必须以 \_main\_ 的方式命名,并且使用关键字 __EXPORT 导出。
在程序的第 14 行中,PX4_INFO() 相当于我们以前学习 C 语言中的 printf() 函数,需要使用的时候需要包含头文件px4_platform_common/log.h。此外还有以下几种形式:
| 打印等级 | 使用场景 |
|---|---|
| PX4_INFO | 用于输出正常的信息 |
| PX4_ERR | 用于输出程序错误时的信息 |
| PX4_DEBUG | 用于调试阶段的一些输出 |
通过上述方式的输出信息,都会记录在飞控的 ULog 文件中,我们也可以通过一些工具(如:Flight Review, flightplot, PlotJuggler)来查看。
添加CMakeList
创建 cmake 文件,并命名为 CMakeLists.txt
############################################################################
#
# Copyright (c) 2015 PX4 Development Team. All rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions
# are met:
#
# 1. Redistributions of source code must retain the above copyright
# notice, this list of conditions and the following disclaimer.
# 2. Redistributions in binary form must reproduce the above copyright
# notice, this list of conditions and the following disclaimer in
# the documentation and/or other materials provided with the
# distribution.
# 3. Neither the name PX4 nor the names of its contributors may be
# used to endorse or promote products derived from this software
# without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
# FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
# COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
# INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
# BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
# OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
# AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
# LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
# ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
# POSSIBILITY OF SUCH DAMAGE.
#
############################################################################
px4_add_module(
MODULE examples__px4_simple_app
MAIN px4_simple_app
SRCS
px4_simple_app.c
DEPENDS
)px4_add_module() 方法根据模块描述构建静态库:
- MODULE:模块的唯一名称(用于区分其它不同的模块),需要和文件名一致,按照惯例,模块名称的前缀是父目录。
- MAIN:模块功能的入口点,相当于模块的main函数。它向操作系统 NuttX 注册命令,以便可以从 PX4 shell 或SITL 控制台中调用它。
添加Kconfig(可选)
创建一个名为 Kconfig 的文件,并定义要命名的符号(请参阅 Kconfig 命名约定)并复制粘贴以下文本:
menuconfig EXAMPLES_PX4_SIMPLE_APP
bool "px4_simple_app"
default n
---help---
Enable support for px4_simple_app在这里,我们将简单的介绍一下什么是 Kconfig ? 它的作用是什么 ?
在 PX4 中 Kconfig 是一个配置系统,它源自 Linux 内核的配置机制。它在 PX4 固件中扮演着重要的角色。以下是 Kconfig的主要作用和特点:
-
配置管理:Kconfig 允许开发者定义和管理各种配置选项,用于控制编译过程中哪些功能或模块被包含或不包含。
-
模块化构建:通过 Kconfig,可以实现 PX4 固件的模块化编译,使得不同的硬件平台或应用场景可以选择性地包含各自所需的功能。
-
依赖管理:Kconfig 可以定义配置选项之间的依赖关系,确保相互依赖的功能被正确启用或禁用。
-
用户界面:Kconfig 通常与 menuconfig 等工具配合使用,提供图形化界面,方便用户选择和配置各种选项。
-
条件编译:基于 Kconfig 的选项,可以在代码中使用条件编译指令,实现灵活的代码组织。
-
减小固件大小:通过选择性地包含功能,可以有效减小最终固件的大小,适应不同的硬件资源限制。
-
跨平台支持:帮助 PX4 在不同的硬件平台上实现更好的可移植性和适配性。
因此,开发者合理的使用 Kconfig,可以更灵活地管理复杂的固件配置;同时也使得最终用户能够根据自己的需求定制 PX4 固件,这对于支持多样化的无人机和机器人平台非常重要。
有兴趣的同学可以通过以下途径获取 Kconfig 更多的相关内容:
-
PX4 官方文档:PX4 开发者指南中包含 Kconfig 相关的信息。网址:https://docs.px4.io/main/en/
-
PX4 GitHub 仓库:查看 PX4 源码中的 Kconfig 文件可以直接了解其使用方式。网址:https://github.com/PX4/PX4-Autopilot
-
Kconfig 语言文档:虽然不是 PX4 特有,但了解 Kconfig 语言本身很有帮助。网址:https://www.kernel.org/doc/Documentation/kbuild/kconfig-language.txt
-
PX4 开发者论坛:关于 Kconfig 使用的讨论。网址:https://discuss.px4.io/
-
Linux Kconfig 文档:由于 PX4 的 Kconfig 源自 Linux,了解 Linux 的 Kconfig 也很有帮助。网址:https://www.kernel.org/doc/Documentation/kbuild/kconfig.txt
编译代码
应用程序现在已经完成。为了运行它,首先需要确保将它加入到对应的飞控板的配置文件中(也就是 *.px4board 文件)。
下面,我们介绍几种常用的配置文件:
- PX4 SITL (Simulator): PX4-Autopilot/boards/px4/sitl/default.px4board
- Pixhawk v1/2: PX4-Autopilot/boards/px4/fmu-v2/default.px4board
- Pixracer (px4/fmu-v4): PX4-Autopilot/boards/px4/fmu-v4/default
其中:PX4-Autopilot/boards/px4/sitl/default.px4board的内容如下:
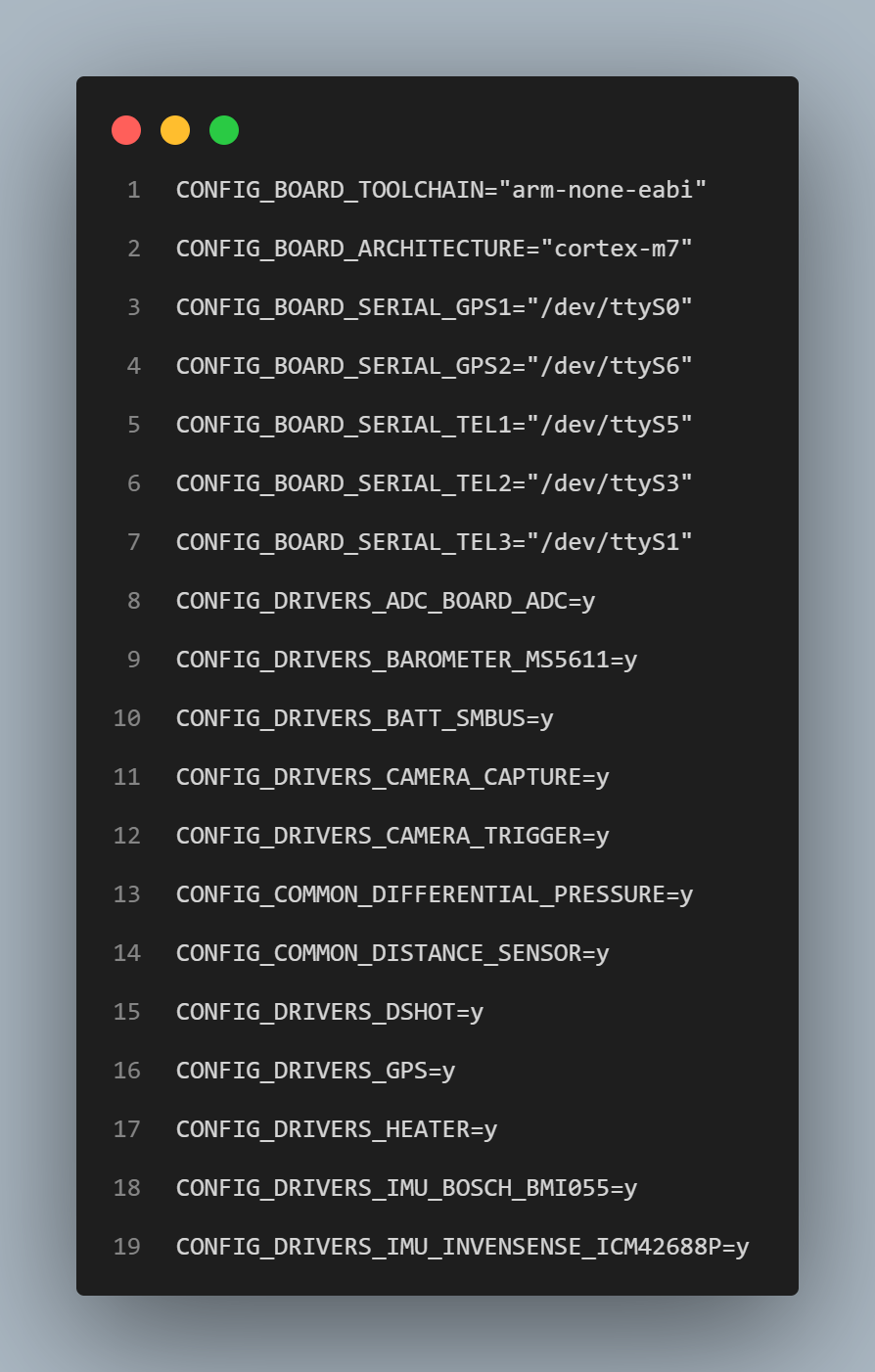 图 1.1 px4_v6c default.px4board
图 1.1 px4_v6c default.px4board
这些 *.px4board 文件可以在 PX4-Autopilot/boards 路径下找到。可以看出这里面每行都是以 CONFIG_ 开头,后面是模块名称,后面是 y/n,y 表示启用,n 表示不启用。因此,为了编译我们刚才写的代码,我们就需要将添加的 px4_simple_app 模块设置为 y。
我们在 PX4-Autopilot 文件夹下打开终端,输入指令:
make px4_fmu-v6c_default boardconfig 如果您使用的是雷迅 v5 版本的飞控,仅需要将上述的 px4_fmu-v6c 改为 px4_fmu-v5 即可。
然后我们将看到如下的界面:
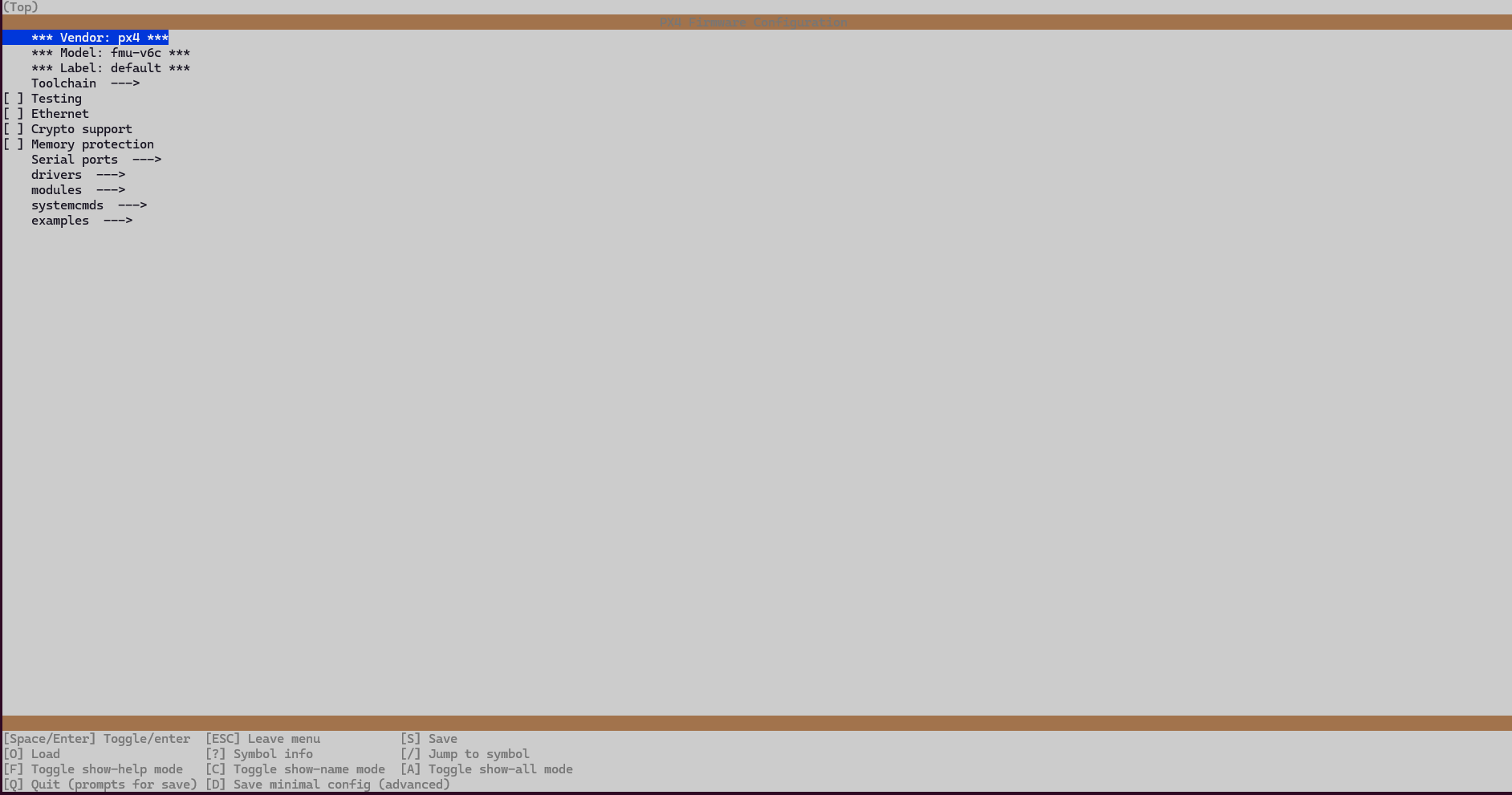 图 1.2 v6c_boardconfig
图 1.2 v6c_boardconfig
将 px4_simple_app 模块选中(按空格键选中)并保存退出,点击键盘上的 S 键进行配置保存。
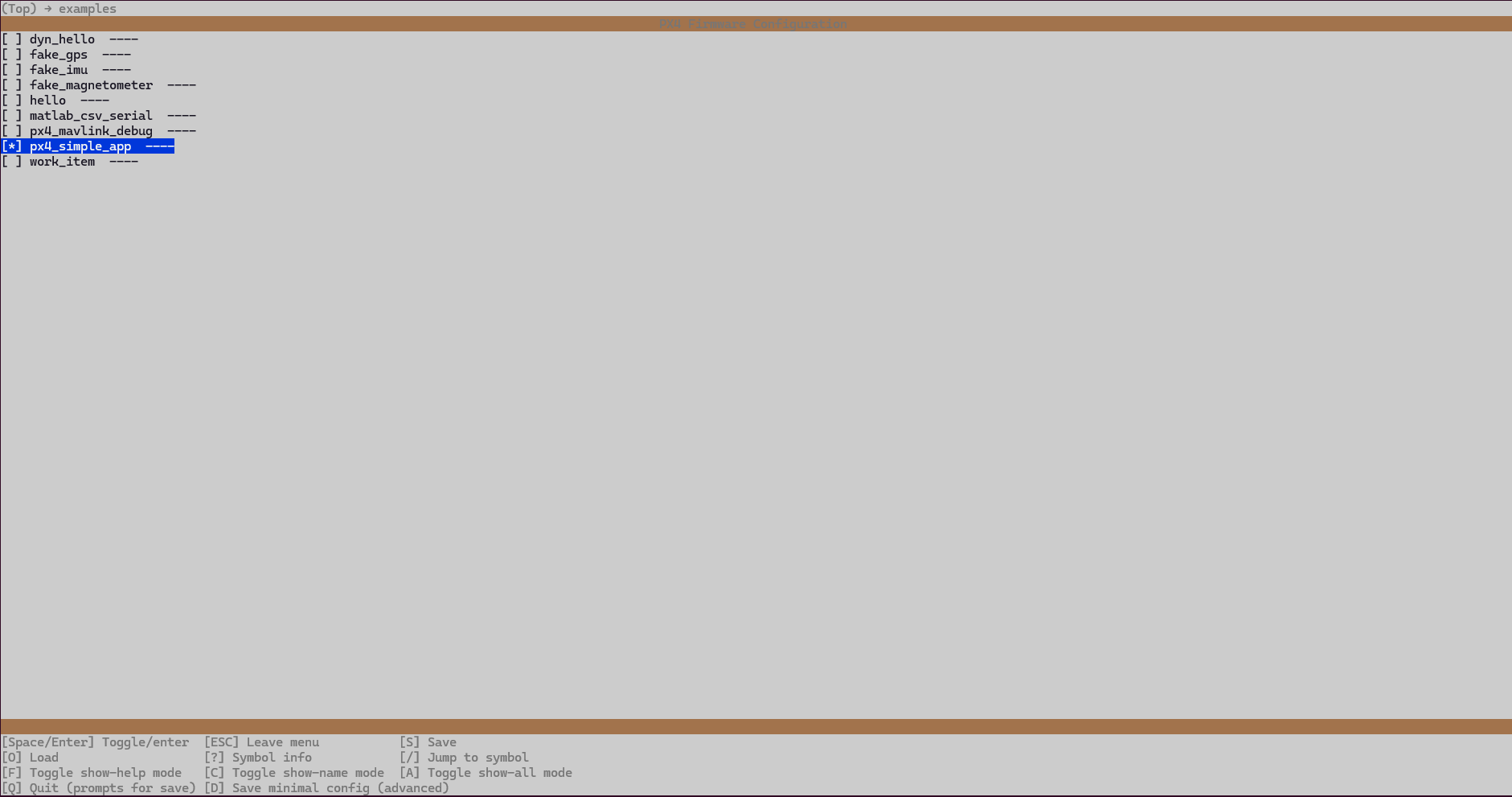 图 1.3 px4_v6c 保存配置
图 1.3 px4_v6c 保存配置
将 px4_simple_app 模块选中并保存退出。再次查看 px4_v6c 的 default.px4board 文件,可以看到最后一行将我们编写的程序配置为 y 了:
CONFIG_SYSTEMCMDS_TOP=y
CONFIG_SYSTEMCMDS_TOPIC_LISTENER=y
CONFIG_SYSTEMCMDS_TUNE_CONTROL=y
CONFIG_SYSTEMCMDS_UORB=y
CONFIG_SYSTEMCMDS_VER=y
CONFIG_SYSTEMCMDS_WORK_QUEUE=y
CONFIG_EXAMPLES_PX4_SIMPLE_APP=y然后,编译代码,这里针对不同的情况,例举相应的编译指令:
| board | 编译指令 |
|---|---|
| Gazebo Simulator | make px4_sitl gz_standard_vtol |
| Pixhawk v6c | px4_fmu-v6c_default |
| Pixhawk v5 | make make px4_fmu-v5_default |
编译好的固件的路径在:PX4_Autopilot/build/px4_fmu-v6c_default
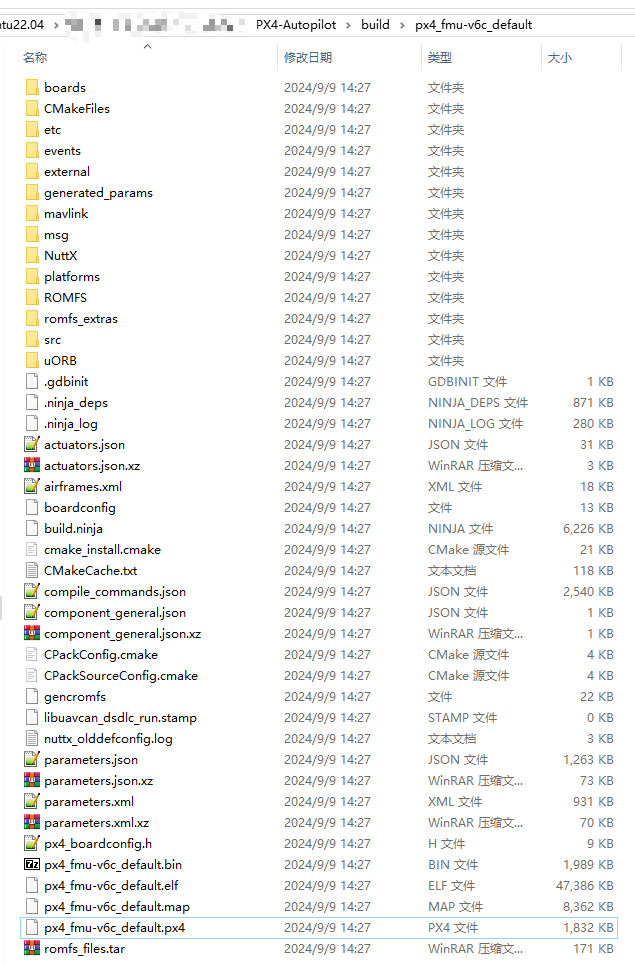 图 1.4 固件路径
图 1.4 固件路径
这里我们可以看到几种不同格式的固件,它们的区别如下:
| 后缀名 | 介绍 | 使用场景 |
|---|---|---|
| .px4 | 这是 PX4 的主要固件文件,通常用于飞行控制器的固件更新,包含了完整的飞行控制软件。 | 适用于一般用户进行固件更新。 |
| .bin | 二进制文件格式,通常用于存储固件的二进制数据,某些硬件可能需要这种格式进行更新。 | 适用于特定硬件或开发者使用。 |
| .elf | 可执行和可链接格式,主要用于开发和调试。它包含了调试信息。 | 适合开发者在调试过程中使用。 |
测试代码
我们通过上述步骤已经编译好了我们的 px4_simple_app 模块,现在我们通过硬件来实操一下。
- 首先,将编译好的固件烧录到飞控中。可以使用如下指令:
make px4_fmu-v6c_default
将我们编译好的固件烧录到飞控中。当烧录完成,您将看到如下界面:
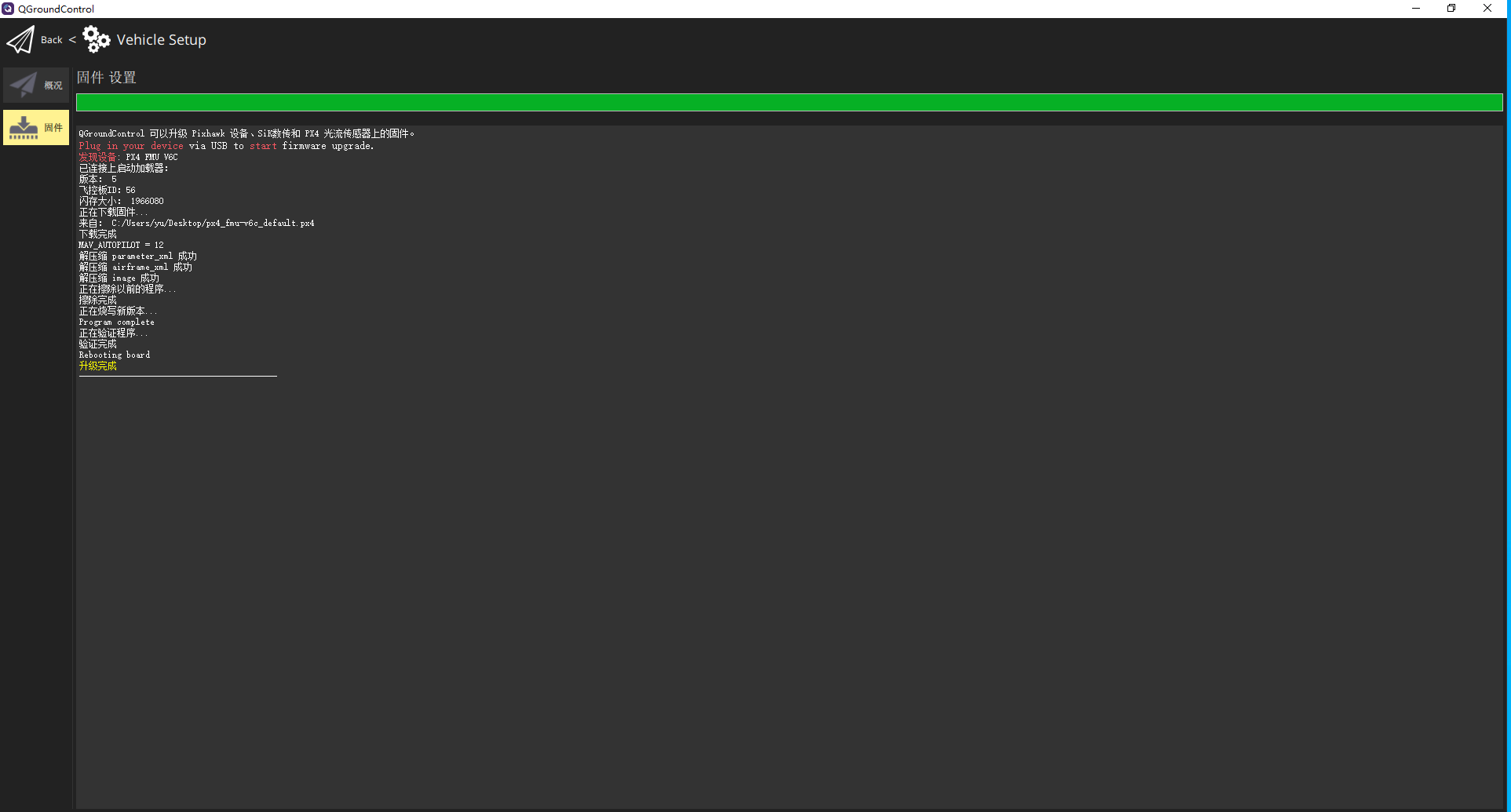 图 1.5 烧录固件
图 1.5 烧录固件
- 连接控制台,我们需要通过串口线或者 USB 线连接控制台,按下 Enter 键进入终端。在终端中,我们可以输入help 指令,然后敲击回车,可以看到如下界面:
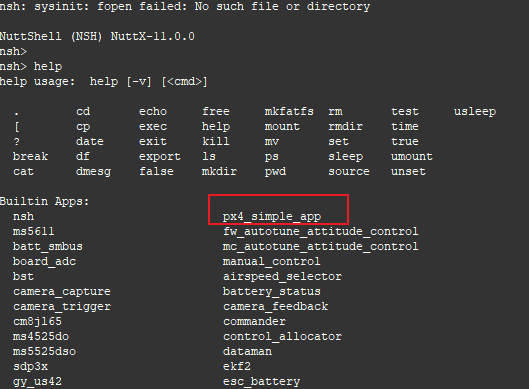
注意,px4_simple_app 现在已经是可用命令了。我们输入 px4_simple_app,然后回车:
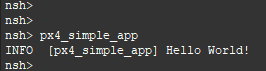
至此,应用程序现在已经正确地注册到了系统中,并且可以正常使用。此外,您还可以尝试在 SITL 环境下,尝试上述的步骤,脱离硬件来实现一次测试。
uORB初体验
现在,我们可以更进一步,获取传感器的数据,以 SensorCombined 主题为例。该主题中存放的是 IMU 的数据。
PX4 硬件抽象的好处在这里发挥了作用!不需要以任何方式与传感器驱动程序进行交互,如果飞控板或传感器更新,也不需要修改您的应用程序。也就是说我们在这里获取传感器的数据,不需要修改传感器那边的代码。
订阅一个主题也很简单,在文件的头部引入需要订阅数据的头文件:
/**
* @file px4_simple_app.c
* Minimal application example for PX4 autopilot
*
* @author Example User <mail@example.com>
*/
#include <px4_platform_common/log.h>
#include <uORB/topics/sensor_combined.h>
int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
__EXPORT int px4_simple_app_main(int argc, char *argv[]);
int px4_simple_app_main(int argc, char *argv[])
{
PX4_INFO("Hello World!");
return OK;
}其中:sensor_sub_fd 是一个主题句柄,可用于执行阻塞等待新数据。当前线程进入睡眠状态,一旦有新数据可用,调度器就会自动唤醒它,在等待期间不会消耗任何 CPU 时间。为此,我们使用 poll() 函数调用。这里介绍一下 px4_poll 函数:
#define px4_poll _GLOBAL poll
int poll(struct pollfd *fds, nfds_t nfds, int timeout);_GLOBAL poll 表示全局作用域下的 poll 函数。可以看出其实 px4_poll() 函数也就是 posix 中的 poll() 函数:
参数说明:
-
fds:传入传出参数,指向 struct pollfd 类型数组的首元素,每个数组元素指定一个描述符以及对其关心的状态,关于这个结构体的说明在本小节后面阐述。
-
nfds:指明 fds 指向的数组元素个数。
-
timeout:该参数指定 poll 阻塞等待文件描述符就绪的毫秒数。这个参数有三种可能:
-
timeout 设置为负数:一直阻塞等待,直到有描述符准备就绪;
-
timeout 设置为 0:不等待,检查描述符后直接返回。
-
timeout 设置为正数:阻塞等待timeout设置的毫秒数,期间有描述符准备就绪就返回,没有就等到时间结束返回。
-
-
返回值:成功返回已准备就绪的描述符个数;超时返回0;失败返回-1。
具体的代码如下:
/****************************************************************************
*
* Copyright (c) 2012-2019 PX4 Development Team. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in
* the documentation and/or other materials provided with the
* distribution.
* 3. Neither the name PX4 nor the names of its contributors may be
* used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
****************************************************************************/
/**
* @file px4_simple_app.c
* Minimal application example for PX4 autopilot
*
* @author Example User <mail@example.com>
*/
#include <poll.h>
#include <px4_platform_common/log.h>
#include <px4_platform_common/posix.h>
#include <uORB/topics/sensor_combined.h>
__EXPORT int px4_simple_app_main(int argc, char *argv[]);
int px4_simple_app_main(int argc, char *argv[])
{
PX4_INFO("Hello World!");
int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
/* 该方式可以等待多主题的数据,此处只等待一组主题的数据 */
px4_pollfd_struct_t fds[] = {
{ .fd = sensor_sub_fd, .events = POLLIN },
};
int error_counter = 0;
while (true) {
/* 每隔 1s 看看传感器主题的数据是否更新 */
int poll_ret = px4_poll(fds, 1, 1000);
/* 处理轮训结果 */
if (poll_ret == 0) {
/* 过了 1s 都没收到数据 */
PX4_ERR("Got no data within a second");
} else if (poll_ret < 0) {
/* 未能成功返回已准备就绪的描述符个数 */
if (error_counter < 10 || error_counter % 50 == 0) {
/* 降低打印频率,防止打印的太快 */
PX4_ERR("ERROR return value from poll(): %d", poll_ret);
}
error_counter++;
} else {
if (fds[0].revents & POLLIN) {
/* 为第一个文件描述符获得的数据 */
struct sensor_combined_s raw;
/* 将传感器原始数据复制到本地缓冲区 */
orb_copy(ORB_ID(sensor_combined), sensor_sub_fd, &raw);
PX4_INFO("Accelerometer:\t%8.4f\t%8.4f\t%8.4f",
(double)raw.accelerometer_m_s2[0],
(double)raw.accelerometer_m_s2[1],
(double)raw.accelerometer_m_s2[2]);
}
}
return OK;
}
}再次编译代码并烧录进飞控。
订阅数据
最后一步是通过在 nsh shell 中输入以下命令,启动任务:
px4_simple_app将会显示以下数据:
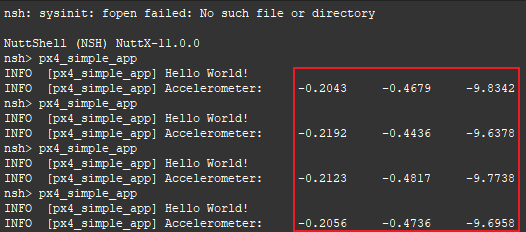
现在您可以模仿上述教程,尝试订阅 SensorGyro 主题中的数据,也就是陀螺仪的数据,并通过终端查看数据。
发布数据
在飞控中,有很多模块,有模块需要订阅上述的 SensorCombined 主题,所以也一定有对应的模块在发布 SensorCombined 主题。
我们在这里不使用 SensorCombined 主题来作为发布数据的实操,采用 VehicleAttitude 主题来作为发布数据。是因为Mavlink 会把该主题的数据下发给地面站,更方便我们查阅。如果学了后续高阶的 Mavlink 的相关知识,您也可以把SensorCombined 主题下发给地面站显示。
这个案例很简单,代码如下:
/****************************************************************************
*
* Copyright (c) 2012-2019 PX4 Development Team. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in
* the documentation and/or other materials provided with the
* distribution.
* 3. Neither the name PX4 nor the names of its contributors may be
* used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
****************************************************************************/
/**
* @file px4_simple_app.c
* Minimal application example for PX4 autopilot
*
* @author Example User <mail@example.com>
*/
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/tasks.h>
#include <px4_platform_common/posix.h>
#include <px4_platform_common/log.h>
#include <unistd.h>
#include <stdio.h>
#include <poll.h>
#include <string.h>
#include <math.h>
#include <uORB/uORB.h>
#include <uORB/topics/sensor_combined.h>
#include <uORB/topics/vehicle_attitude.h>
__EXPORT int px4_simple_app_main(int argc, char *argv[]);
int px4_simple_app_main(int argc, char *argv[])
{
PX4_INFO("Hello World!");
/* 订阅 sensor_combined 主题 */
int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
/* 限制更新频率为 5Hz */
orb_set_interval(sensor_sub_fd, 200);
/* 公告 vehicle_attitude 主题 */
struct vehicle_attitude_s att;
memset(&att, 0, sizeof(att));
orb_advert_t att_pub = orb_advertise(ORB_ID(vehicle_attitude), &att);
/* 可以订阅一个主题多组数据,这里只订阅一组;举例,有3个imu发布 sensor_accel 主题,那么这个数据就有三组 */
px4_pollfd_struct_t fds[] = {
{ .fd = sensor_sub_fd, .events = POLLIN },
/* 如果要订阅多组,可以这样写:
* { .fd = other_sub_fd, .events = POLLIN },
*/
};
int error_counter = 0;
for (int i = 0; i < 5; i++) {
/* 每隔 1s 看看传感器主题的数据是否更新 */
int poll_ret = px4_poll(fds, 1, 1000);
/* 处理轮训结果 */
if (poll_ret == 0) {
/* 过了 1s 都没收到数据 */
PX4_ERR("Got no data within a second");
} else if (poll_ret < 0) {
/* 未能成功返回已准备就绪的描述符个数 */
if (error_counter < 10 || error_counter % 50 == 0) {
/* 降低打印频率,防止打印的太快 */
PX4_ERR("ERROR return value from poll(): %d", poll_ret);
}
error_counter++;
} else {
if (fds[0].revents & POLLIN) {
/* 获取该主题的第一个文件描述符 */
struct sensor_combined_s raw;
/* 将传感器原始数据复制到本地缓冲区 */
orb_copy(ORB_ID(sensor_combined), sensor_sub_fd, &raw);
PX4_INFO("Accelerometer:\t%8.4f\t%8.4f\t%8.4f",
(double)raw.accelerometer_m_s2[0],
(double)raw.accelerometer_m_s2[1],
(double)raw.accelerometer_m_s2[2]);
/* 将加速度的数据赋值给姿态,没有任何意义,这里只是演示作用 */
att.q[0] = raw.accelerometer_m_s2[0];
att.q[1] = raw.accelerometer_m_s2[1];
att.q[2] = raw.accelerometer_m_s2[2];
orb_publish(ORB_ID(vehicle_attitude), att_pub, &att);
}
/* 如果要处理该主题的其它数据,可以这样写:
* if (fds[1..n].revents & POLLIN) {}
*/
}
}
PX4_INFO("exiting");
return 0;
}
该函数 px4_simple_app_main 主要功能如下:
- 初始化与订阅:
- 打印 “Hello World!” 信息。
- 订阅
sensor_combined主题,用于接收传感器数据。 - 设置传感器数据更新频率为 5 Hz。
- 发布态度信息:
- 初始化
vehicle_attitude结构体,并创建一个发布者att_pub。 - 将
vehicle_attitude的初始值发布出去。
- 初始化
- 轮询传感器数据:
- 使用
px4_poll轮询sensor_combined数据,共执行 5 次循环。 - 每次轮询等待 1 秒钟。
- 使用
- 处理轮询结果:
- 无数据:如果在 1 秒内没有收到数据,打印错误信息。
- 错误返回:如果
px4_poll返回负值,记录错误次数并打印错误信息。 - 收到数据:如果收到数据,执行以下操作:
- 复制传感器数据到本地缓冲区。
- 打印加速度计数据。
- 将加速度计数据作为四元数存储到
vehicle_attitude结构体,并发布出去。
- 退出程序:
- 循环结束后,打印退出信息并返回 0。
同样的,重复以上的make和烧录的步骤,在终端中运行 px4_simple_app,您也可以在 mavlink_inspector 中看到数据。
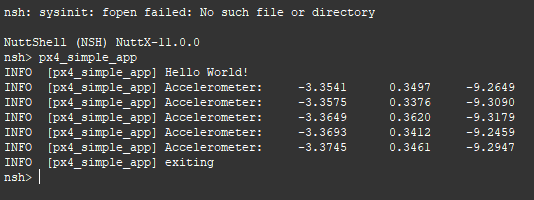 图 1.9 查看数据
图 1.9 查看数据
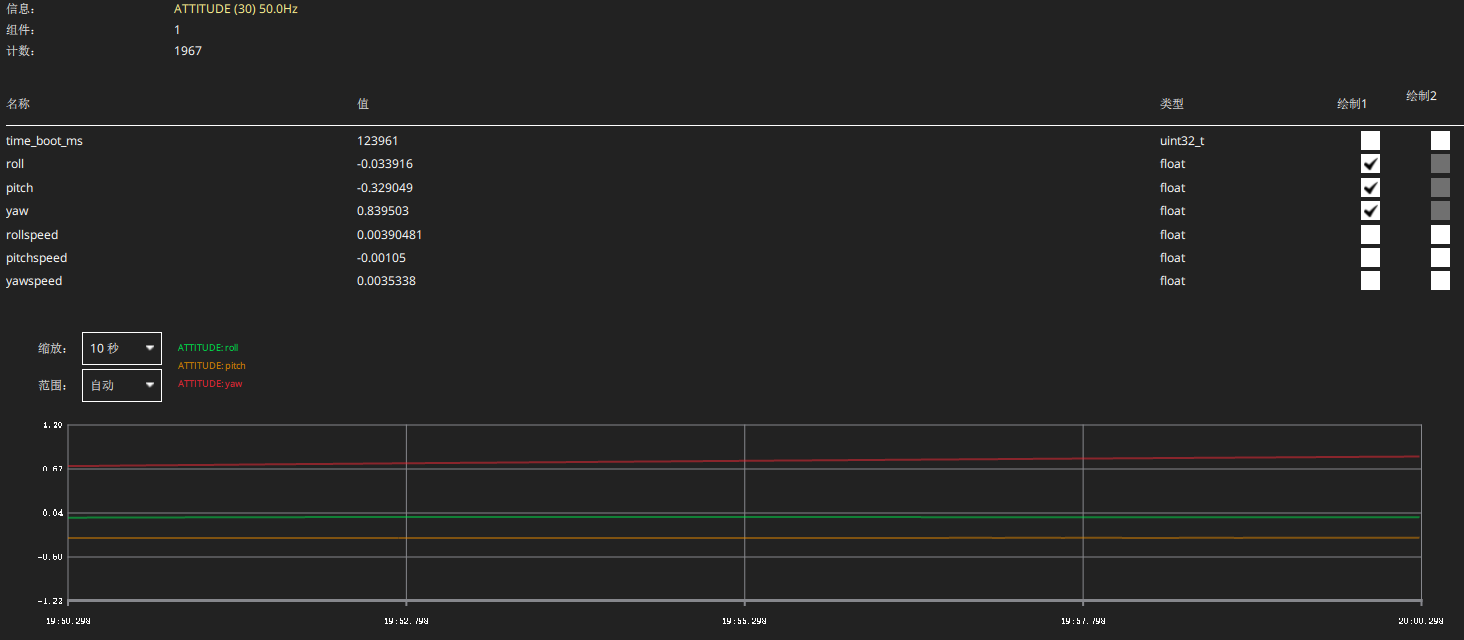 图 1.10 查看姿态数据
图 1.10 查看姿态数据
总结
本节课涵盖了开发基本 PX4 自动驾驶应用程序所需的一切。此外,uORB的消息定义通常在PX4的源代码中,具体路径为 msg 文件夹下。每个消息都有相应的 .msg 文件,里面定义了字段及其类型。